Building cutting-edge robots for over 16 years.
I’ve spent the past 16 years building robots at home on land, under water, or in space; that were made from materials that include fabric, 3D-printed metal and plastic, carbon fiber, aluminum, titanium, A36, and maraging steel; that have been powered by electricity, propane, gasoline, and diesel; that have moved with electric motors, pressurized air, pressurized water, and pressurized oil; that have weighed between 10 and 30,000 pounds; that have moved via wheels, tracks, two legs, four legs, six legs, or fins; and that have pushed the state of the art of what robots can do.
These are some of the robots I’ve built.

NaChair (2019)
My nature-loving fiancée temporarily lost her ability to hike due to foot injuries and became depressed about it. I studied her favorite hiking trails in California and developed an off-road robotic wheelchair that could handle them so we could hike her favorite trails again.
NaChair is capable of hiking for 10 miles at 3 mph, climbing and descending 25% grades, traversing terrain ranging from mud to sand to gravel, climbing over 6” obstacles, and driving up curbs and staircases.
I was the sole engineer on the project, fabricated most mechanical parts at Autodesk’s Pier 9 makerspace, and was assisted by a small volunteer team of fabricators.
You can see the NaChair’s debut here, and video of it hiking Point Reyes here.

4-DoF Pneumatic Arm for Rovers (2019)
NASA has a constant issue where it wants to install sensitive scientific equipment on its rovers, while wanting them to be able to perform high-impact tasks like drilling rock or collecting samples. Traditional electric arms don’t work well for this because their stiff gearmotors transmit destructive vibrations back to the rover while performing tasks.
Breeze Automation and the Yale Faboratory developed an inexpensive, gentle, 4 degree-of-freedom (DoF) pneumatic robot arm made of continuum joints to perform example tasks at NASA Ames while attached to the K-Rex rover. The arm demonstrated novel technology like rubber position sensors, fabric bellows, and custom proportional valves, and completed tasks while being safe around humans.
I led the 9-person project team and personally developed the welded fabric bellows, the tooling to manufacture the fabric bellows, and the chassis and structure of the robot arm itself.

7-DoF Hydraulic Arm for ROVs (2018)
The U.S. Navy relies on divers to perform the majority of its work underwater because no remotely operated vehicle (ROV) approaches the dexterity of a human being when performing delicate manipulation tasks. The Office of Naval Research (ONR) was interested in developing robust, force-sensitive, dexterous robot arms for small ROVs that would allow them to support and augment divers.
Breeze Automation proposed and developed two 7-DoF inflatable robot arms, controlled via VR headset, to perform example underwater tasks. The neutrally-buoyant arms used low-pressure ambient water to power the hydraulic actuation system, inflate static arm structures, and move fabric bellows to power joints.
I led the 5-person project team and developed the 2-DoF joint design, the welded fabric bellows, the tooling to manufacture the fabric bellows, and the chassis and structure of the arm itself.
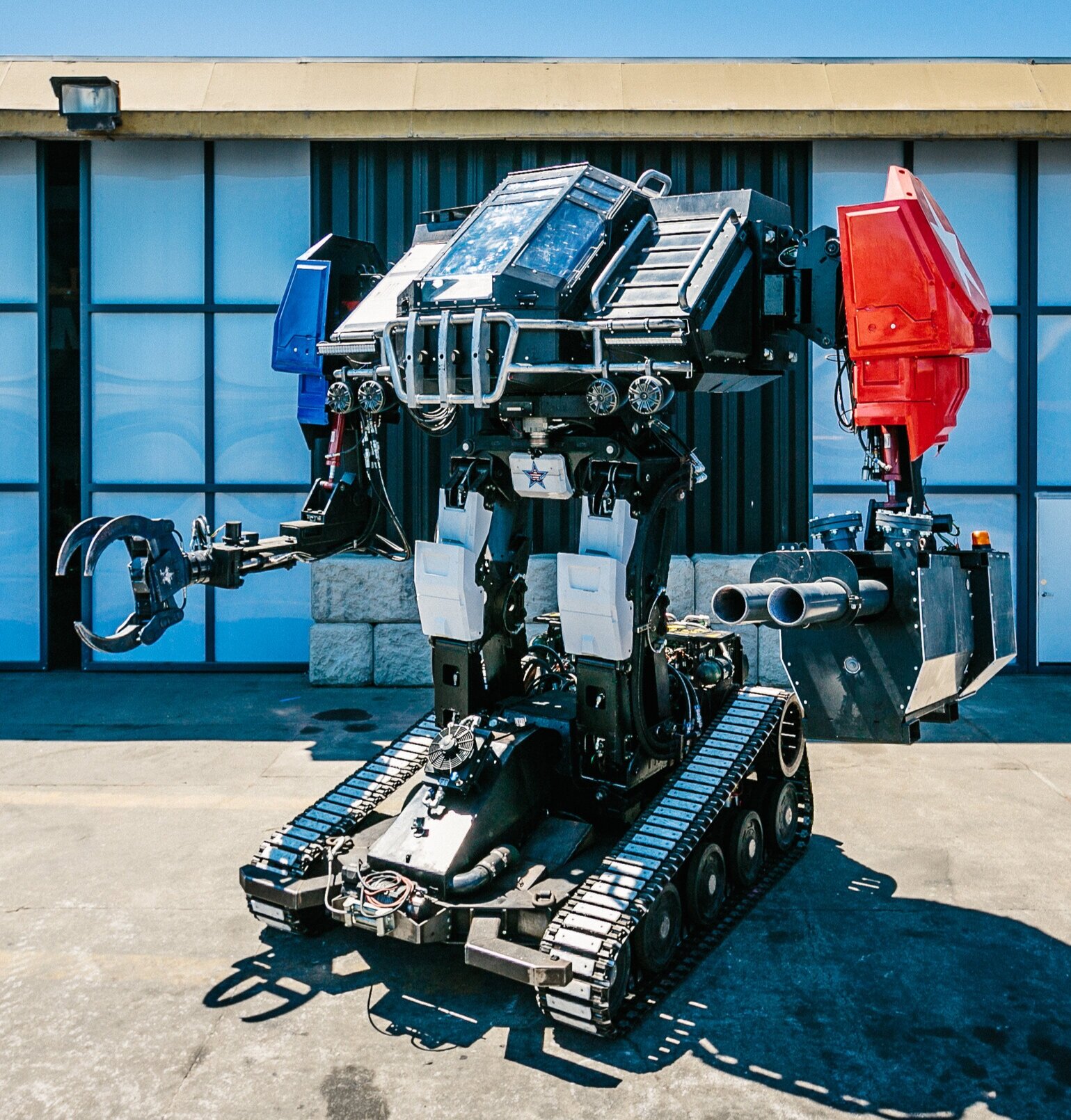
Eagle Prime (2017)
MegaBots developed Eagle Prime for the Giant Robot Duel, an international battle of humanoid combat mechs that took place outside of Tokyo, Japan in 2017. The mech is piloted by a team of two, and is designed to fight other mechs both at-range and hand-to-hand.
Eagle Prime is a 15-ton, 16-foot-tall, 430 horsepower, 16-DoF, gas-powered hydraulic mech with modular lower arm weapons that include a 4-foot chainsaw, claws that can pick up cars, a double-barreled cannon that fires 3-pound paint cannonballs at 120 mph, 500lb steel knives, and more. The robot folds up to ship via low-boy trailer anywhere in the U.S., and breaks into 4 major pieces to ship internationally via container ship.
I led the 13-person project team and developed 13 degrees of freedom, the leg and hip system, the modular arm systems, and multiple weapon systems.
You can see Eagle Prime’s debut here, the Giant Robot Duel here, and the web series following Eagle Prime’s development here.

Iron Glory (2015)
MegaBots developed Iron Glory to be America’s first humanoid combat mech, in order to help launch a next-generation sports league of live giant mech fights. Iron Glory was then used to challenge Suidobashi Heavy Industry’s KURATAS to the world’s first Giant Robot Duel.
Iron Glory is a 6-ton, 15-foot-tall, 24 horsepower, 12-DoF, 2-seater, gas-powered hydraulic mech prototype. It features ranged weaponry, including a pneumatic cannon that fires a single 3-pound paint cannonball at 120 mph and a 20-tube missile launcher that fires 1-pound paint missiles at 150 mph.
I led the 5-person project team and was the sole mechanical engineer for the robot, which was built in 6 months for a debut at the Bay Area Maker Faire in 2015.
You can see Iron Glory’s debut here.

Jimmy (2014)
I was commissioned by a client to create a bipedal, walking, talking, gesticulating “spokesrobot” named Jimmy for a tradeshow. The client required a specific branded look to the robot, and required that the robot be predominantly 3D printed.
Jimmy featured 23 electric DoF, had the ability to speak over wireless or Bluetooth audio connections, could create a speaking performance with matching gesticulation, could take a picture with onboard cameras, and balance and walk slowly on level ground.
I led the 5-person project team, and was the sole mechanical engineer for the robot. Three Jimmy robots were designed, built and delivered to the client in 6 weeks.

Stompy (2013)
Stompy is a giant hexapod that was developed by Project Hexapod, a robot design class at the Artisan’s Asylum makerspace that turned into a volunteer-run company after a successful crowdfunding campaign.
Stompy is a 16-foot-wide, 10-foot-tall, 130 horsepower, 6-legged, propane-powered hydraulic walking robot that seats two for long romantic walks down post-apocalyptic beaches.
I led the 12-person all-volunteer project team for several years, and designed the leg systems and hydraulic powerplant. Stompy is still under controls system development by a volunteer team in Cambridge, MA.

LS3 (2012)
The Legged Squad Support System (LS3) was developed by Boston Dynamics for DARPA, and later the U.S. Marine Corps, as a robotic mule to carry packs for a squad of soldiers traveling on foot over rough terrain.
LS3 was an 800-pound, 50 horsepower, 4-legged, gas-powered hydraulic walking robot that could autonomously follow a leader, carry a 400lb payload, walk up 30% grades, and self-right after falling.
I served as systems integrator (combining the engineering work of multiple teams) and mechanical engineer on the project, and helped design the chassis, lower legs, and overall body plan.
You can see a video of LS3’s debut here.

PETMAN
(2011)
PETMAN was developed by Boston Dynamics for the Chemical and Biological Defense Program (CBDP) to be a powered humanoid mannequin capable of simulating soldier movements, in order to test protective clothing for hazardous environments.
PETMAN was a 26 degree-of-freedom, 5’9” hydraulic humanoid walking robot powered through a tether. Its early prototypes are believed to be the first dynamically-balancing humanoid bipeds ever made, and ultimately led to the later series of ATLAS robots.
I served as a mechanical engineer on the project, designing the lower leg and ankle systems. I also served as PETMAN’s kinematic model, recording a series of representative exercises in a motion capture chamber.
You can see a video of PETMAN testing suits here.

BigDog (2010
)
BigDog was developed by Boston Dynamics for DARPA’s Biodynotics program as a prototype of a robotic mule to carry backpacks and other equipment for a squad of soldiers traveling on foot over rough terrain.
BigDog was a 250-pound, 20 horsepower, 4-legged, gas-powered hydraulic walking robot that could dynamically balance, recover from disturbances like kicks, slips and stumbles, climb steep unstructured terrain, and move through mud, snow, and vegetation.
I served as a mechanical engineer focused on increasing the mean-time-to-failure (MTTF) of the robot’s legs, hydraulic system, and actuators via root cause analysis.
You can see a video of BigDog’s debut here.

Olin Robot Tuna (2009)
The Olin Robot Tuna was developed by a Senior Capstone Program in Engineering (SCOPE) team at the Franklin W. Olin College of Engineering as part of an STTR program for ONR to develop novel, high-performance, biologically-inspired Unmanned Underwater Vehicles (UUVs).
The robot’s 3D-printed hull matched the body plan of a 48” long juvenile Bluefin, featuring 4 DoF and a modular compliant hydraulic tail. It could move via thruster at 2.5 knots, turn within one body length, and swim with a fin instead of a thruster if necessary.
I led the 6-student project team for one semester and served as the lead mechanical engineer responsible for the hull design, system integration, and compliant tail design.
You can see a video of the Tuna’s debut here.
Want to know more?
Reach out to talk about how Imagination Fabrication can help bring your dreams to life.